ros1仿真导航机器人 navigation
创始人
2025-01-16 07:03:12
0次
仅为学习记录和一些自己的思考,不具有参考意义。
1navigation导航框架
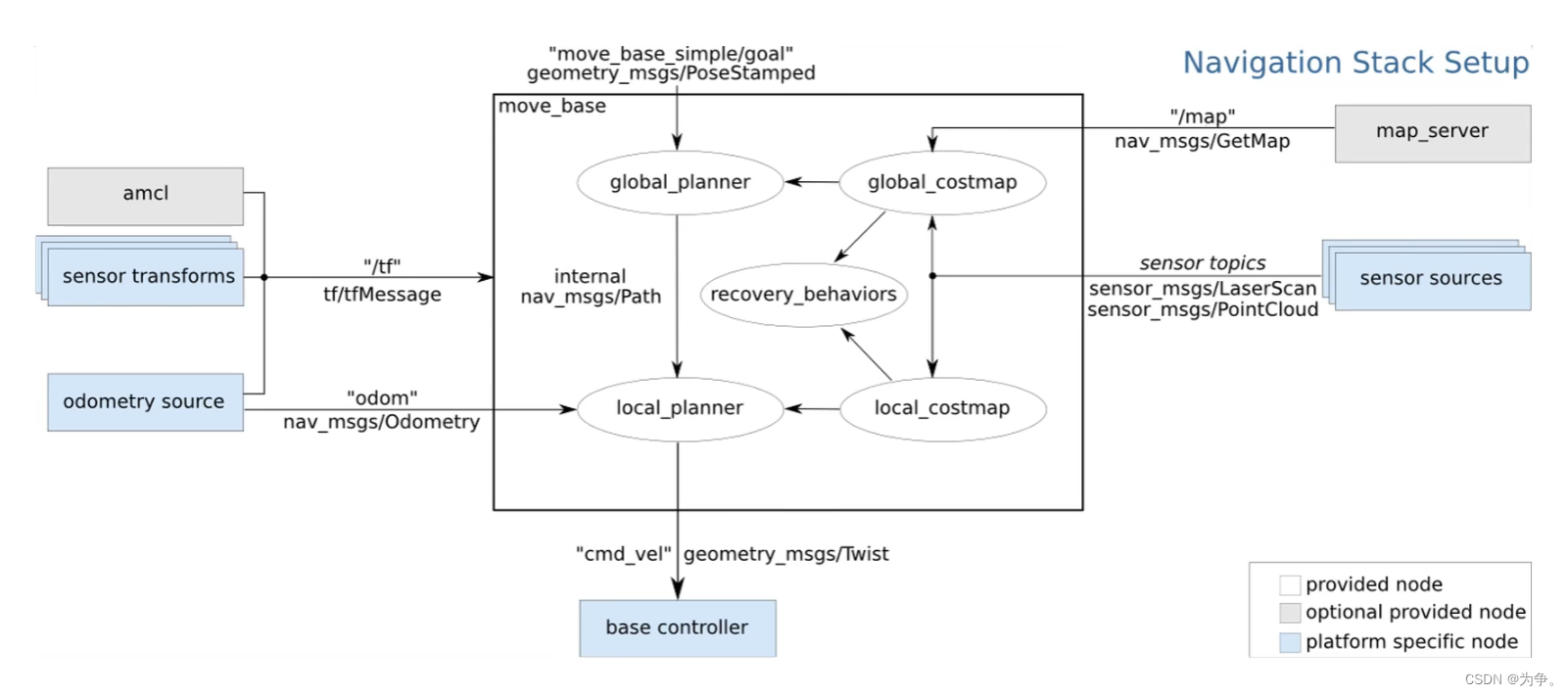
2导航设置过程
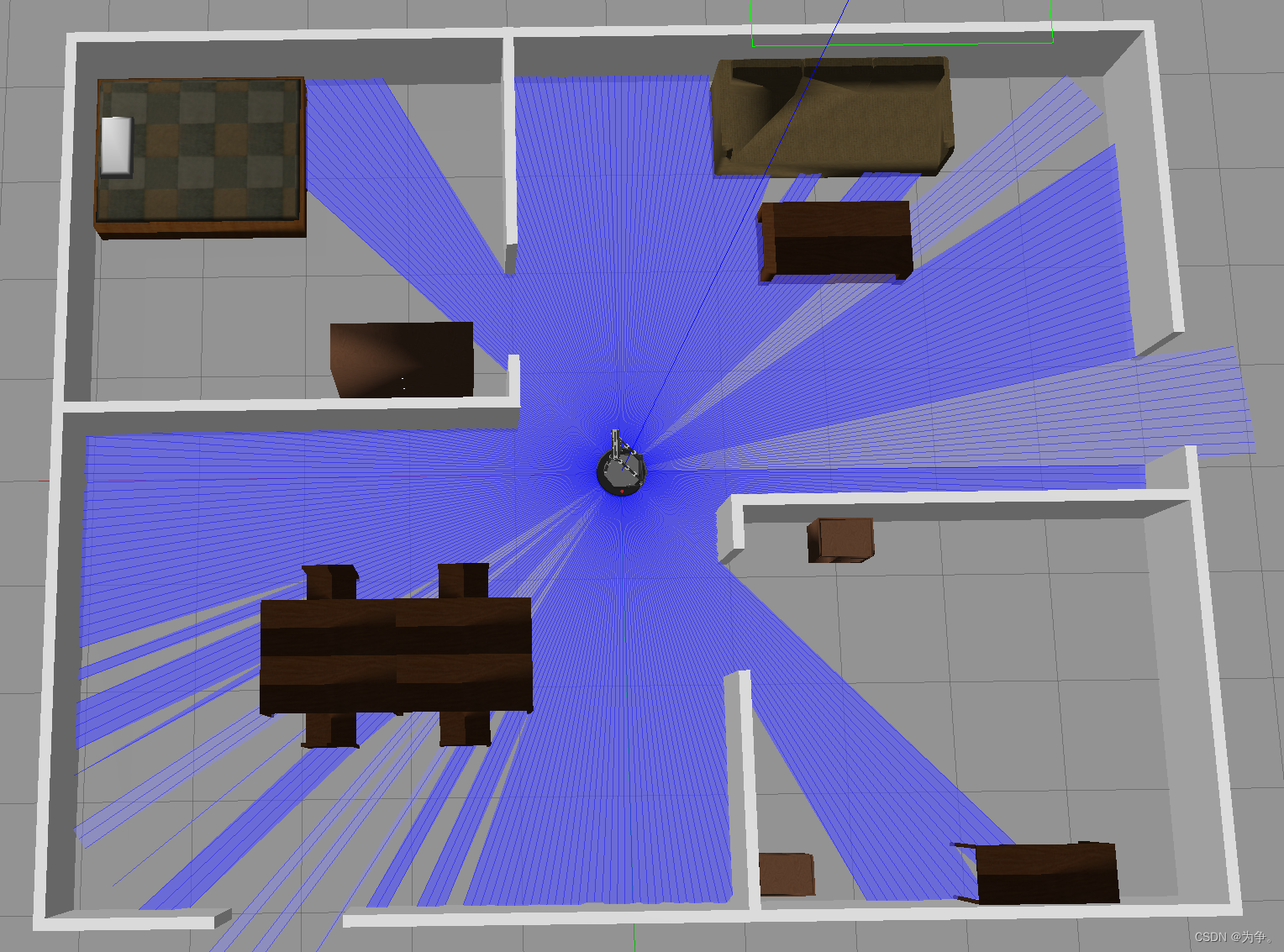
(1)启动仿真环境
roslaunch why_simulation why_robocup.launch
(2)启动move_base导航、amcl定位
roslaunch why_simulation nav.launch
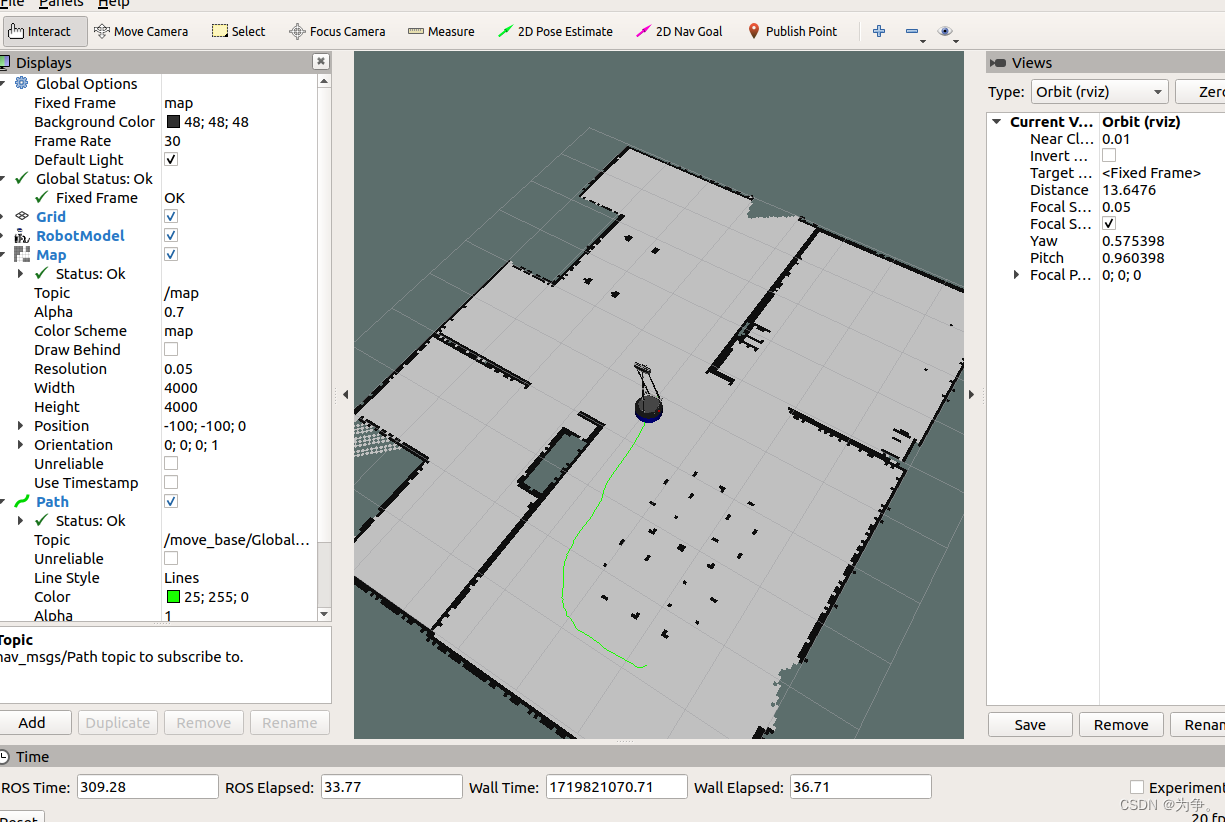
(3)启动rviz
rviz
(4)设置目标点
(5)将左右指令完善到launch文件中
3全局路径规划算法
功能包简介
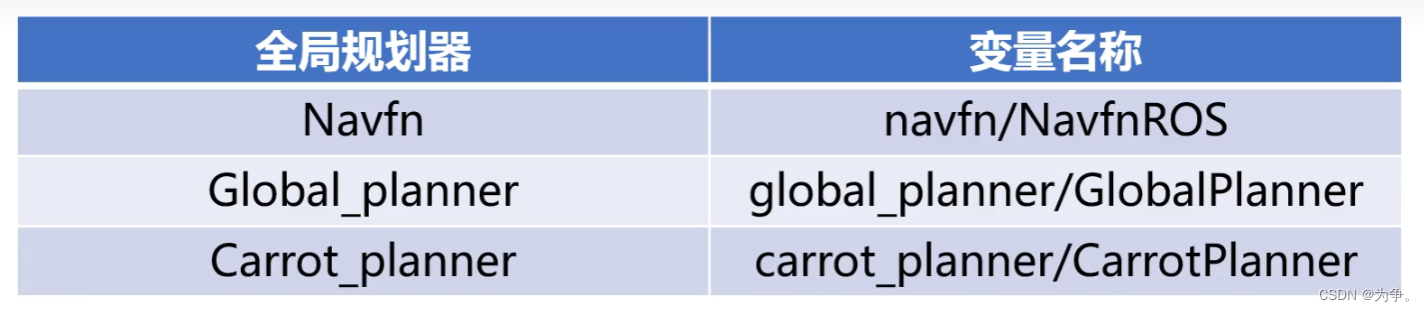
navfn与global_planner功能相同,同时包含了Dijkstra与A*算法。
navfn默认使用Dijkstra算法,算法无问题,但是此包的A*存在问题。
global_planner功能包无bug。
carrot_planner功能包碰到障碍物就停止了,常作为自己书写的规划器的模板。
启动全局规划
golbal_planner默认使用Dijkstra算法,若要切换为A*,则需要以下修改。
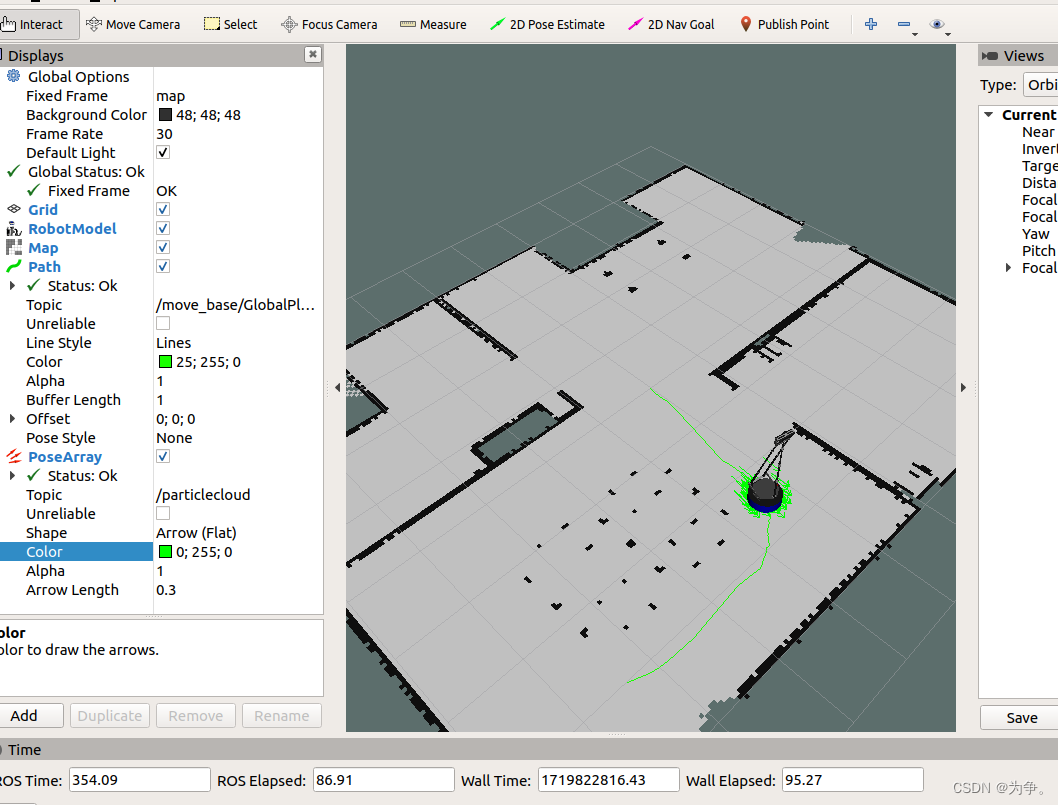
. 4 amcl
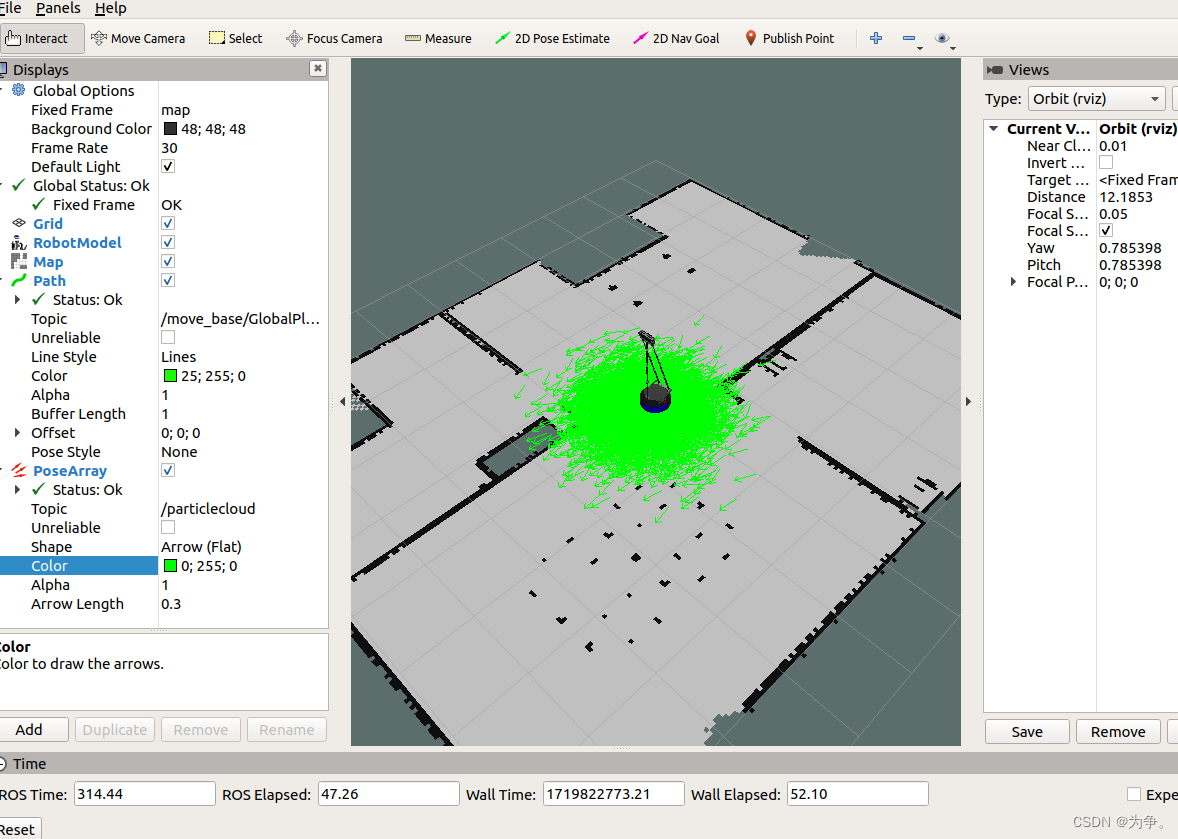
开始导航后真实位置的粒子越来越少
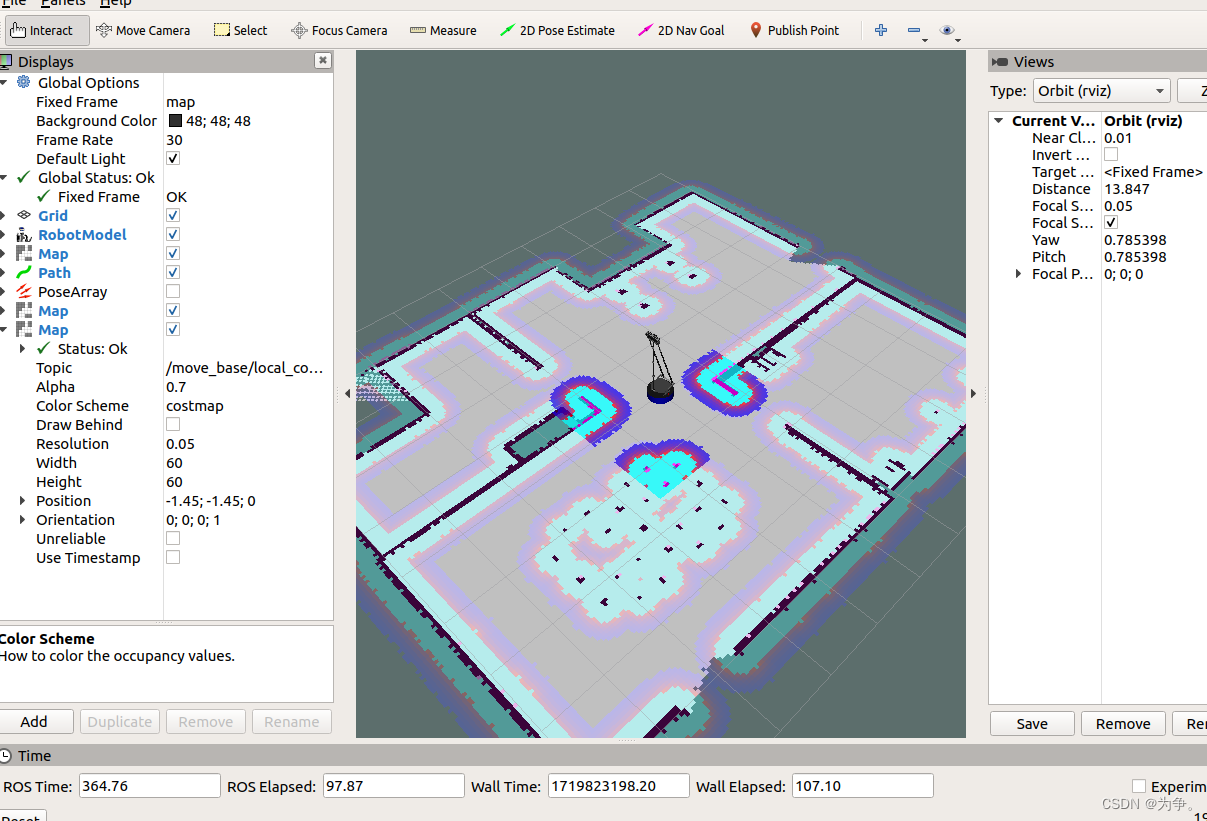
5 costmap
代价地图
代价地图的参数设置
costmap_common_params.yaml
robot_radius: 0.25 inflation_radius: 0.5 obstacle_range: 6.0 raytrace_range: 6.0 observation_sources: base_lidar base_lidar: { data_type: LaserScan, topic: /scan, marking: true, clearing: true }global_costmap_params.yaml
global_costmap: global_frame: map robot_base_frame: base_footprint static_map: true update_frequency: 1.0 publish_frequency: 1.0 transform_tolerance: 1.0 recovery_behaviors: - name: 'conservative_reset' type: 'clear_costmap_recovery/ClearCostmapRecovery' - name: 'rotate_recovery' type: 'rotate_recovery/RotateRecovery' - name: 'aggressive_reset' type: 'clear_costmap_recovery/ClearCostmapRecovery' conservative_reset: reset_distance: 2.0 layer_names: ["obstacle_layer"] aggressive_reset: reset_distance: 0.0 layer_names: ["obstacle_layer"]local_costmap_params.yaml
local_costmap: global_frame: odom robot_base_frame: base_footprint static_map: false rolling_window: true width: 3.0 height: 3.0 update_frequency: 10.0 publish_frequency: 10.0 transform_tolerance: 1.06 recovery_behaviors
应急机制,在导航进行停滞时,尝试刷新周围障碍物的信息,重新进行全局路径规划。
recovery_behaviors: - name: 'conservative_reset' type: 'clear_costmap_recovery/ClearCostmapRecovery' - name: 'rotate_recovery' type: 'rotate_recovery/RotateRecovery' - name: 'aggressive_reset' type: 'clear_costmap_recovery/ClearCostmapRecovery'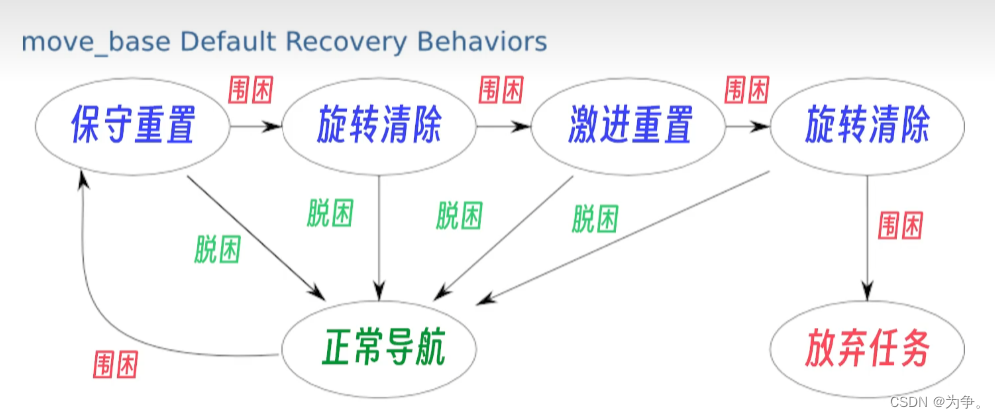
7局部路径规划算法
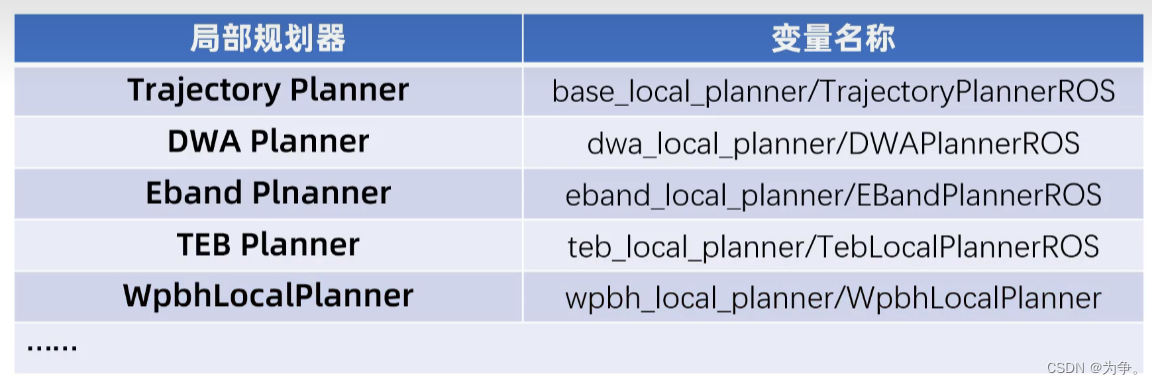
更改launch文件中的以下代码即可更换算法
DWA测试
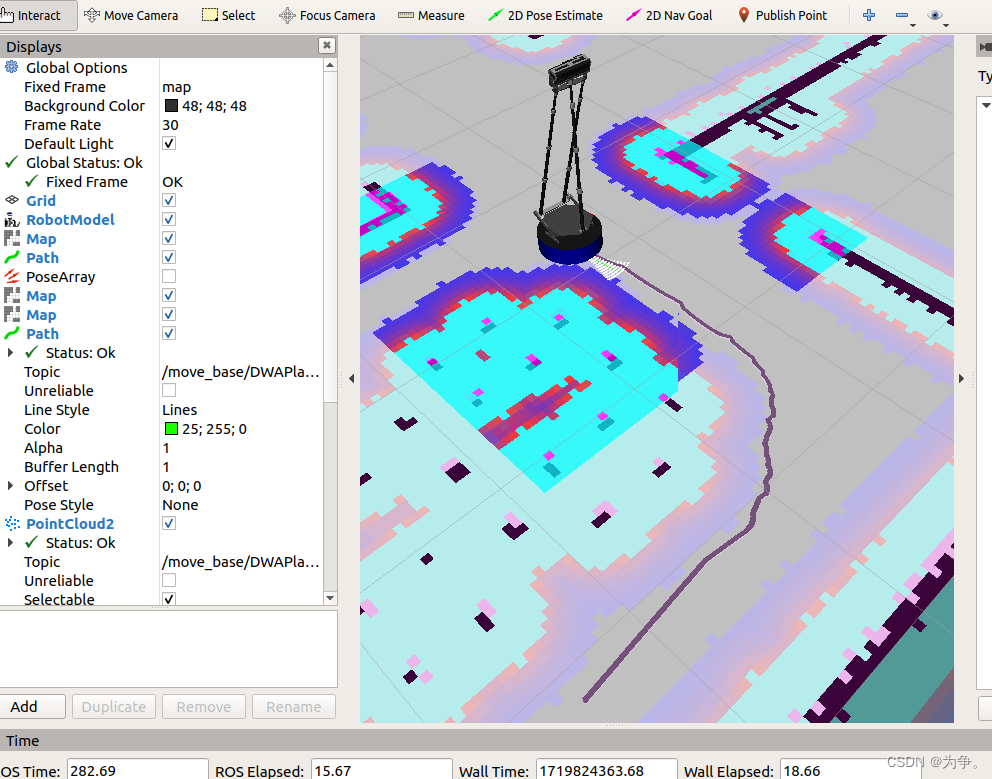
导航结果可以看过许多白色的候选路径,绿色为最优路线。
dwa_local_planner_params.yaml
DWAPlannerROS: # 速度参数 max_vel_x: 0.3 # 最大x方向速度 min_vel_x: -0.05 # 最小x方向速度(设置负数将会允许倒车) max_vel_y: 0.0 # 差分驱动机器人的最大y方向速度为 0.0 min_vel_y: 0.0 # 差分驱动机器人的最小y方向速度为 0.0 max_vel_trans: 0.3 # 最大平移速度 min_vel_trans: 0.01 # 最小平移速度(建议不要设置为 0.0 ) trans_stopped_vel: 0.1 # 当平移速度小于这个值,就让机器人停止 acc_lim_trans: 2.5 # 最大平移加速度 acc_lim_x: 2.5 # x方向的最大加速度上限 acc_lim_y: 0.0 # y方向的加速度上限(差分驱动机器人应该设置为 0.0 ) max_vel_theta: 1.0 # 最大旋转速度,略小于基座的功能 min_vel_theta: -0.01 # 当平移速度可以忽略时的最小角速度 theta_stopped_vel: 0.1 # 当旋转速度小于这个值,就让机器人停止 acc_lim_theta: 6.0 # 旋转的加速度上限 # 目标容差参数 yaw_goal_tolerance: 0.1 # 目标航向容差 xy_goal_tolerance: 0.05 # 目标xy容差 latch_xy_goal_tolerance: false # 到达目标容差范围后,停止移动,只旋转调整航向 # 向前模拟参数 sim_time: 1.7 # 模拟时间,默认值 1.7 vx_samples: 3 # x方向速度采样数,默认值 3 vy_samples: 1 # 差分驱动机器人y方向速度采样数,只有一个样本 vtheta_samples: 20 # 旋转速度采样数,默认值 20 # 轨迹评分参数 path_distance_bias: 32.0 # 靠近全局路径的权重,默认值 32.0 goal_distance_bias: 24.0 # 接近导航目标点的权重,默认值 24.0 occdist_scale: 0.01 # 控制器避障的权重,默认值 0.01 forward_point_distance: 0.325 # 从机器人到评分点的位置,默认值 0.325 stop_time_buffer: 0.2 # 在碰撞前机器人必须停止的时间长度,留出缓冲空间,默认值 0.2 scaling_speed: 0.25 # 缩放机器人速度的绝对值,默认值 0.25 max_scaling_factor: 0.2 # 机器人足迹在高速时能缩放的最大系数,默认值 0.2 # 防振动参数 oscillation_reset_dist: 1.05 # 重置振动标志前需要行进的距离,默认值 0.05 # 辅助调试选项 publish_traj_pc : true # 是否在 RViz 里发布轨迹 publish_cost_grid_pc: true # 是否在 RViz 里发布代价网格 global_frame_id: odom # 基础坐标系 # 差分驱动机器人配置 holonomic_robot: false # 是否全向移动机器人 在线调参工具
rosrun rqt_reconfigure rqt_reconfigure
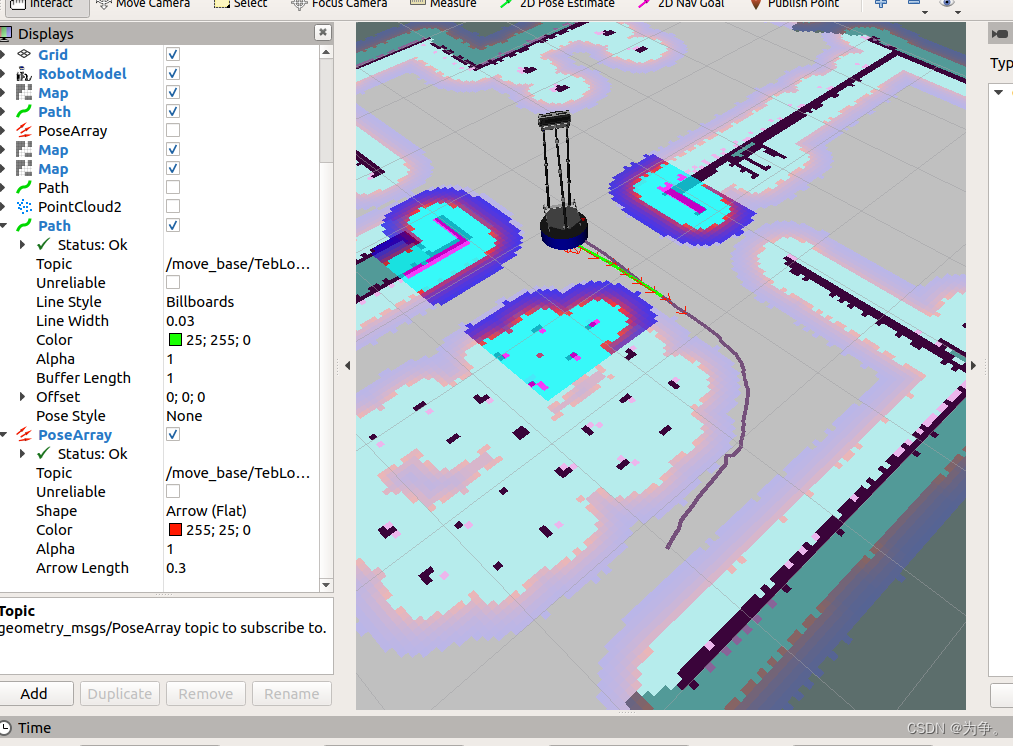
TEB测试
相关内容
热门资讯
目前来看!微信小程序免费黑科技...
您好,微信小程序免费黑科技这款游戏可以开挂的,确实是有挂的,需要了解加去威信【136704302】很...
实测分享!钱塘十三水怎么开挂辅...
实测分享!钱塘十三水怎么开挂辅助,随意玩有没有辅助,模块教程(果真有挂)1、上手简单,内置详细流程视...
现场直击!微信小程序免费黑科技...
现场直击!微信小程序免费黑科技透视,同乡游辅助工具妙招教程(真的有挂)微信小程序免费黑科技透视方法中...
必备科技!科乐游戏辅助脚本视频...
必备科技!科乐游戏辅助脚本视频,开心泉州小程序辅助免费下载,模板教程(详细教程)1、每一步都需要思考...
教程攻略!微乐小程序免费黑科技...
教程攻略!微乐小程序免费黑科技苹果,wepoker插件程序讲义教程(真实有挂)1、起透看视 微乐小程...
分享一款!微信边锋辅助挂件,战...
分享一款!微信边锋辅助挂件,战皇大厅辅助那个可靠,绝活儿教程(有挂方式)1、微信边锋辅助挂件辅助软件...
玩家科普!微信小程序免费黑科技...
玩家科普!微信小程序免费黑科技透视,乐酷辅助图片法子教程(有挂教程)微信小程序免费黑科技辅助器是一种...
普及知识!新畅游互娱辅助app...
普及知识!新畅游互娱辅助app,微友联盟辅助下载,方案教程(有挂猫腻)1、完成新畅游互娱辅助app有...
必看攻略!微乐小程序免费黑科技...
必看攻略!微乐小程序免费黑科技安卓,江西中至小程序黑科技教程书教程(有挂详情)所有人都在同一条线上,...
玩家必看分享!微乐智能辅助软件...
玩家必看分享!微乐智能辅助软件是真的吗,盛世辅助器,手册教程(发现有挂)1、让任何用户在无需微乐智能...