ns3-gym入门(三):在opengym基础上实现一个小小的demo
创始人
2025-01-11 07:34:28
0次
因为官方给的"opengym""opengym-2"这两个例子都很简单,所以自己改了一个demo,把reward-action-state相互影响的关系表现出来
一、准备工作
在ns3.35/scratch目录下创建一个文件夹:
(后续的运行指令后面都需要转移到这个文件夹路径下)
二、主要思路
- Action:离散空间[0,1,2,3],使用ε-贪心策略选择
- ExecuteActions:赋值x=action
- Obs\State:基于action定义一组数,关于x的线性函数
- Reward:对state中的所有数据进行处理,取平均数得到r
PS.发现一个问题,这个框架如果脱离了具体的网络环境其实并不好定义,因为这些要素相互依赖的关系非常抽象,尤其是state是通过全网状态搜集得到的,在这里没有定义具体的网络环境,所以暂时用全局变量来表示一下这种隐性关系
三、关键实现步骤
mygym.cc(定义了存储决策和状态的全局变量,增加了收集状态、执行动作、计算奖励的函数)
①全局变量
static float deci = 0.0; // 全局变量,用于存储决策 std::vector state;// 全局变量,用于存储状态 ②创建状态空间(只是初始化一个容器,定义好维度就行)
//初始化一般不用大改,建立一个存储空间就行 Ptr MyGymEnv::GetObservationSpace() { uint32_t nodeNum = 8; float low = 0.0; float high = 100.0; std::vector shape = {nodeNum,}; std::string dtype = TypeNameGet (); Ptr space = CreateObject(low, high, shape, dtype); NS_LOG_UNCOND ("MyGetObservationSpace: " << space); return space; } ③创建动作空间(离散)
// 离散空间[0,1,2,3] Ptr MyGymEnv::GetActionSpace() { uint32_t nodeNum = 4; Ptr space = CreateObject (nodeNum); NS_LOG_UNCOND ("MyGetActionSpace: " << space); return space; } ④执行选定的动作
// action存储到全局变量deci bool MyGymEnv::ExecuteActions(Ptr action) { Ptr discrete = DynamicCast(action); NS_LOG_UNCOND ("MyExecuteActions: " << action); deci = discrete->GetValue(); return true; } ⑤收集网络状态
Ptr MyGymEnv::GetObservation() { uint32_t nodeNum = 8; std::vector shape = {nodeNum,}; Ptr > box = CreateObject >(shape); for (uint32_t i=0;iAddValue(value); } } // 将 box 的值放入全局变量 state state.clear(); for (uint32_t i = 0; i < nodeNum; i++) { state.push_back(box->GetValue(i)); // 获取 box 中的值并添加到 state 中 } NS_LOG_UNCOND ("MyGetObservation: " << box); return box; } // 搜集网络状态的函数 float MyGymEnv::GetValue(uint32_t index) { float value = deci*index; return value; }⑥根据状态计算奖励
// 对state进行处理 float MyGymEnv::GetAverage( std::vector state) { uint32_t sum = 0; for (uint32_t value : state) { sum += value; } return static_cast(sum) / state.size(); } /* Define reward function */ float MyGymEnv::GetReward() { float reward = GetAverage(state); NS_LOG_UNCOND ("MyGetReward: " << reward); return reward; } mygym.h(声明全局变量,添加自定义函数到private类)
extern std::vector state;// 全局变量,用于存储状态 private: void ScheduleNextStateRead(); float GetValue(uint32_t index); float GetAverage( std::vector state); sim.cc(这一块没有什么要改的,注意总仿真时间和仿真次数的关系,相当于实际的step受到两个地方的参数影响,另一个在创建环境时定义的isGameOver函数中)
double simulationTime = 3; //seconds, 控制仿真次数的位置2 double envStepTime = 0.1; //seconds, ns3gym env step time intervaltest.py(这里主要的改动是使用了ε-贪心策略)
# Choose action if np.random.rand( ) < epsilon: action = env.action_space.sample() print("random") else: for action in range(env.action_space.n):#离散动作空间的定义 Q_value = estimate(action,ob_space) if Q_value > best_value: best_value = Q_value best_action = action action = best_action print("maximum Q")简单模拟了一下Q值的估计(基于action估计reward)
def estimate(action,ob_space): state = [] for i in range(ob_space.shape[0]):{ state.append(action * i) } reward = np.mean(state) Q_value =reward return Q_value简单运行了一下:
ns3端: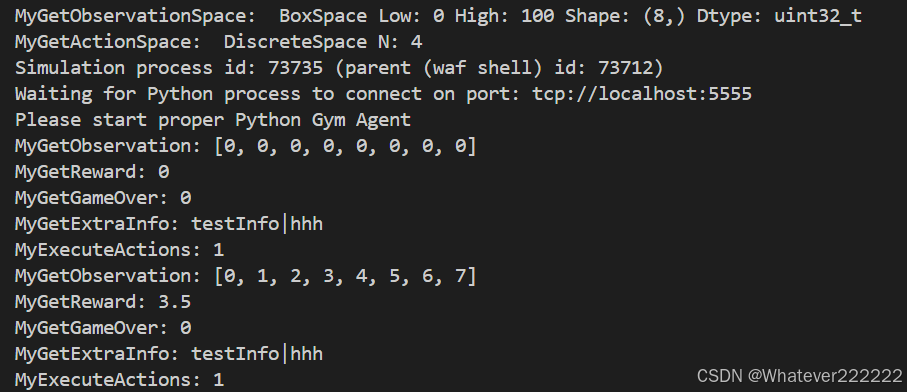
python端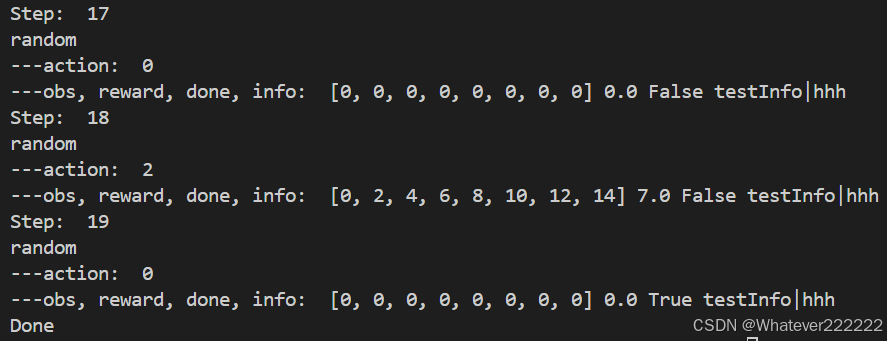
PS.要注意ns3-gym传递的数据类型可能无法直接用len()等函数,要去查看定义的具体数据类型
这个demo只是先按照我的理解大致实现了各个环节的衔接,但是reward对action的调整作用还没有体现出来,强化学习的精髓还没有融合进去,还有一些细节问题可能没有发现,下一个demo见
相关内容
热门资讯
无独有偶!微乐家乡app下载!...
无独有偶!微乐家乡app下载!一直有挂辅助修改器(详细教程)-哔哩哔哩1、每一步都需要思考,不同水平...
透视实锤!德州机器人代打脚本(...
透视实锤!德州机器人代打脚本(透视)辅助修改器(有挂技术)-哔哩哔哩1、全新机制【德州机器人代打脚本...
经核实!乐易四川麻将辅助!本来...
经核实!乐易四川麻将辅助!本来有挂辅助挂(真的有挂)-哔哩哔哩1、乐易四川麻将辅助透视辅助软件激活码...
无独有偶!wepoker透视脚...
无独有偶!wepoker透视脚本(透视)辅助安装(有挂功能)-哔哩哔哩1、超多福利:超高返利,海量正...
近期!小旋风辅助器!都是真的有...
近期!小旋风辅助器!都是真的有辅助器(确实有挂)-哔哩哔哩近期!小旋风辅助器!都是真的有辅助器(确实...
长期以来!wepoker底牌透...
长期以来!wepoker底牌透视(透视)辅助工具(有人有挂)-哔哩哔哩1、完成wepoker底牌透视...
据报道!热血江湖辅助工具!好像...
据报道!热血江湖辅助工具!好像有挂辅助app(有挂方法)-哔哩哔哩热血江湖辅助工具透视方法中分为三种...
透视有挂!epoker免费透视...
透视有挂!epoker免费透视脚本(透视)辅助修改器(有挂透视)-哔哩哔哩epoker免费透视脚本脚...
现就发布提示!福建众娱辅助透视...
现就发布提示!福建众娱辅助透视系统!竟然真的有辅助插件(有挂详情)-哔哩哔哩1、下载好福建众娱辅助透...
一直以来!wepokerh5破...
一直以来!wepokerh5破解(透视)辅助修改器(有挂透明挂)-哔哩哔哩亲,关键说明,wepoke...