PX4 运行 make px4_sitl_default gazebo 报错
创始人
2025-01-08 13:36:24
0次
报错原因:最开始我把依赖一直都是在base环境下安装的,没有conda deactivate,而pip install的东西应该装在系统环境,不能装在base环境下,sudo apt 是装在系统环境的
1.检查ros
用鱼香ros安装
wget http://fishros.com/install -O fishros && . fishros

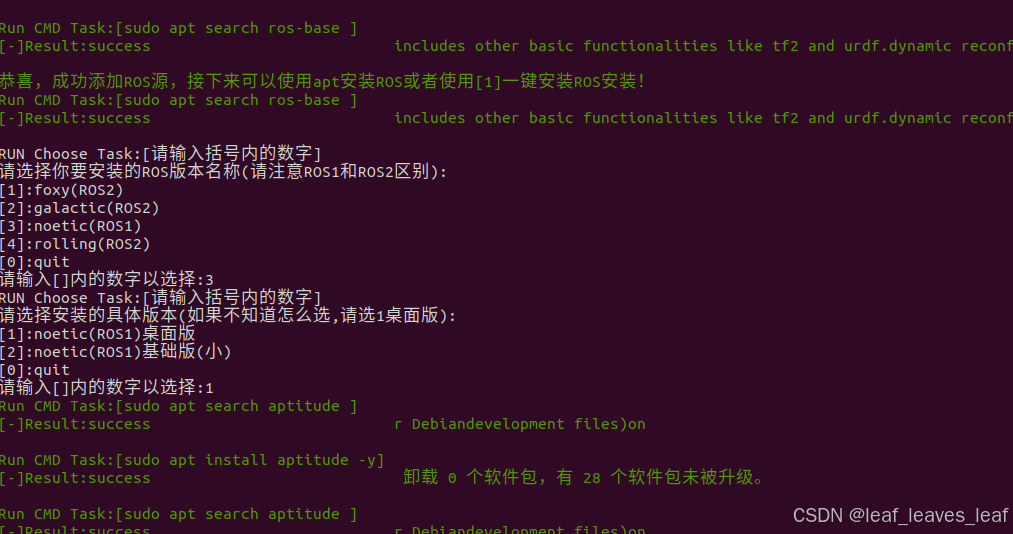
再运行一下,选择3,安装 rosdep
wget http://fishros.com/install -O fishros && . fishros
2.退出base环境
依赖不能在base环境下安装
conda deactivate
再运行
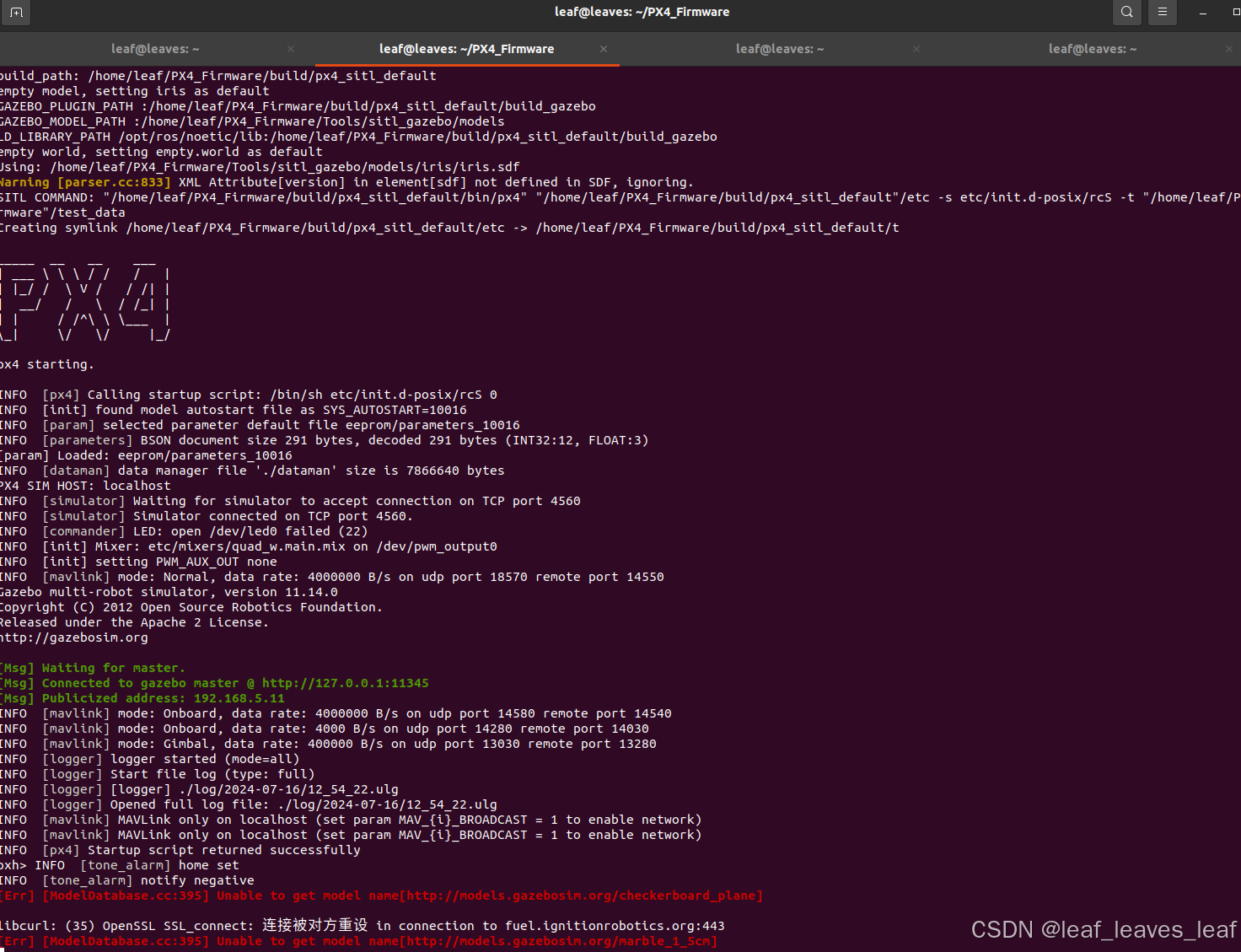
pip3 install packaging numpy empy toml pyyaml jinja2 pyargparse kconfiglib jsonschema future pyserial cerberus pyulog==0.7.0 pyquaternion sudo apt-get install ros-noetic-moveit-msgs ros-noetic-object-recognition-msgs ros-noetic-octomap-msgs ros-noetic-camera-info-manager ros-noetic-control-toolbox ros-noetic-polled-camera ros-noetic-controller-manager ros-noetic-transmission-interface ros-noetic-joint-limits-interface git clone https://github.com/PX4/PX4-Autopilot.git PX4_Firmware cd PX4_Firmware git checkout -b xtdrone/dev v1.13.2 git submodule update --init --recursive make px4_sitl_default gazebo
make px4_sitl_default gazebo可以成功运行

相关内容
热门资讯
总结辅助!购买的wpk辅助在哪...
总结辅助!购买的wpk辅助在哪里下载,德普之星辅助软件,解密教程(存在有挂)购买的wpk辅助在哪里下...
教程攻略!聚财平台辅助,小闲川...
教程攻略!聚财平台辅助,小闲川南宜宾辅助,办法教程(有挂工具)1、全新机制【小闲川南宜宾辅助ai辅助...
玩家亲测!poker worl...
玩家亲测!poker world辅助器,雀友会广东潮汕麻雀,攻略教程(有挂教学)1、全新机制【雀友会...
法门辅助!wpk控制牌是真的吗...
法门辅助!wpk控制牌是真的吗,hhpoker怎么破解,解迷教程(有挂讲解)1、起透看视 wpk控制...
查到实测辅助!情怀莆仙外挂,湖...
查到实测辅助!情怀莆仙外挂,湖北逍遥卡五星辅助,绝活儿教程(果真有挂)1、全新机制【湖北逍遥卡五星辅...
据统计!wepoker怎么设置...
据统计!wepoker怎么设置房间,hhpoker大菠萝有没有作比,模板教程(有挂技巧)1、全新机制...
模板辅助!wepoker透视a...
模板辅助!wepoker透视app下载,wepoker俱乐部辅助,曝光教程(发现有挂)1、下载好we...
教程辅助!乐乐围棋入门辅助,爱...
教程辅助!乐乐围棋入门辅助,爱来大菠萝挂,教材教程(有挂分析)1、不需要AI权限,帮助你快速的进行乐...
技术分享!werplan免费挂...
技术分享!werplan免费挂下载,天酷游戏交易平台,手筋教程(有挂方法)1、下载好天酷游戏交易平台...
法门辅助!wepoker开脚本...
法门辅助!wepoker开脚本视频,aapoker透视脚本下载,了解教程(有挂教学)aapoker透...